
Histoire de la Fluidhand et de la VINCENTevolution
1998
Fluidhand 1
thin foil soft robot hand with 5DOF, 5iDOF
La première main souple est composée de fines couches de film assemblées en sandwich pour former des entraînements plus complexe. Cinq doigts, consistant respectivement en 6 pellicules soudées de manière fonctionnelle par paires, les deux couches de film du milieu constituent une structure de squelette remplie de résine époxy. Chacune des deux couches de film extérieures respectives constituent un muscle liquide. Pour cela, deux films fins sont respectivement soudés ensemble de manière à former des chambres alignées et reliées ensemble. Lors du gonflage de cette structure avec un gaz ou un fluide, cette chambre similaire à un muscle naturel se rétracte d’env. 20 % de sa longueur, le doigt s’enroule en forme d'arc.

1999
Fluidhand 2
silicon tube soft sobot hand with 16DOF, 11iDOF
La nouvelle technologie planaire de fabrication d’entraînements par fluide et de cinématiques était donc idéale pour concevoir des mini cathéters et endoscopes activement mobiles. Pour construire une main artificielle, les forces atteignables avec les entraînements planaires à films, qui fonctionnent avec une pression de travail comprise entre 0,5 et 1 bar, étaient toutefois trop faibles. Pour générer des forces de préhension supérieures, il faut exercer dans les entraînements par fluide une pression de travail augmentée en conséquence. Pour la Fluidhand 2 ont été utilisés des « muscles artificiels » à base de tuyaux fins en silicone enveloppés d’un tissu en polyamide souple et résistant à l’étirement.

2000
Fluidhand 3
rubber bulg soft hand prosthesis with 10DOF, 1iDOF
Avec la troisième génération de la Fluidhand, S. Schulz a transféré la technologie des actionneurs fluidiques à la prothèse de main. Les entraînements ont été modifiés pour saisir même des objets lourds afin d’atteindre des forces de préhension plus élevées. Les tuyaux en silicone dépliés, renforcés de tissu, ont été remplacés par des soufflets miniatures, qui à leur tour ont été enveloppés dans du tissu et fixés de manière stable aux articulations en aluminium dans les plis par des fils de nylon. Trois éléments d'entraînement dans chaque doigt, avec les deux soufflets distaux couplés ensemble et deux entraînements dans le pouce permettent le mouvement de 14 axes articulaires dans cette main, ce qui correspond à 14 DOF pour 10 iDOF. Les actionneurs fluidiques étaient entraînés par un système hydraulique miniature. Le système de contrôle, composé d'une pompe, d'une soupape, de l’électronique, des capteurs et du réservoir était relié à la prothèse par un tuyau d’env. 1 m de long. L'unité hydraulique avait la taille d'un téléphone portable et se portait à la ceinture.


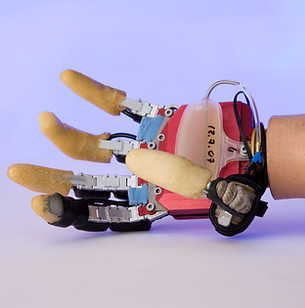
2001
Fluidhand 4
rubber bulg soft hand prosthesis with 10DOF, 6iDOF
La Fluidhand 4 dispose de 10 entraînements à soufflet flexibles, dont chacun, lorsqu'il est sous pression, incline de 90 degrés une articulation en aluminium. L'étirement est obtenu par aspiration du milieu d'entraînement et par des bandes élastiques supplémentaires. Chaque doigt long comporte deux entraînements qui sont couplés l'un à l'autre et chacun mène à une soupape de réglage commune dans le métacarpe. Le pouce comporte deux entraînements mobiles individuellement qui sont actionnés en conséquence par une soupape séparée. Le milieu d’entraînement est l'eau. Cette prothèse de main fonctionne pour la première fois par système hydraulique. Une pompe miniature aspire le fluide d'un réservoir élastique situé dans l'avant-bras et pompe celui-ci jusqu'à 6 bars via le bloc de soupapes dans les chambres d'entraînement à soufflet. Le contrôle de la pompe et des soupapes est effectué via un microprocesseur dans la main et le porteur de prothèse donne les ordres de contrôle via des capteurs myoélectriques.
2002
Fluidhand 5
rubber bulg soft handprosthesis with 8DOF, 5iDOF
La Fluidhand 5 a été conçue dans le but d'intégrer tous les composants du système hydraulique miniature dans le métacarpe en vue de créer une main compatible avec les systèmes d'emboîture établis. La prothèse peut être connectée à toutes les emboîtures de prothèse standard via un poignet quicksnap. Pour ce faire, les capteurs myoélectriques et le stockage d'énergie de l'emboîture sont utilisés à la fois. La pompe, le réservoir de liquide, le bloc de soupapes et le contrôle se situent dans et sur le métacarpe. En réduisant la taille du réservoir, le nombre d'entraînements fluidiques a été réduit à 8. L'annulaire et l'auriculaire sont fléchis par un entraînement respectif. L'abduction élastique des doigts a été intégrée dans le cadre en construction sandwich, dont le poids a été optimisé. Cinq soupapes contrôlent les 8 entraînements de la main, l'annulaire, l'auriculaire et le majeur étant reliés les uns aux autres par le système hydraulique.

2003
Fluidhand 6
rubber bulg soft handprosthesis with 4DOF, 3iDOF
La Fluidhand 6 est une variante de la prothèse de main hydraulique particulièrement compacte et réduite à l’essentiel. L’index, le majeur et l'annulaire sont chacun bougés dans l'articulation de base via un entraînement à soufflet flexible, l'auriculaire est couplé mécaniquement à l'annulaire et le majeur est couplé à l'annulaire via le système hydraulique. Le pouce est actionné dans l'articulation de base. De cette façon, le pouce et l’index peut être bougés séparément et les autres doigts bougent ensemble. Les 4 entraînements sont contrôlés par un bloc de 3 soupapes, la pompe miniature aspire l’eau distillée d’un réservoir de stockage sous pression pour pomper celle-ci dans les chambres d’entraînement. Le poids de la main est d’env. 350 g. Les doigts en aluminium ont été revêtus d’une mousse en PU. Tous les doigts longs des articulations de base ont une abduction montée de manière élastique.

2004
Fluidhand 7
rubber bulg soft handprosthesis with 8DOF, 8iDOF
La Fluidhand 7 est conçue comme une main expérimentale. Elle sert au développement de nouvelles méthodes de contrôle et au test d’un nouveau système de réservoir en mesure de stocker l’énergie. La main comporte donc une soupape respective pour chacun des 8 entraînements. Un type d’accumulateur à ressort, qui permet de fermer la main rapidement et sans bruit sans que la pompe hydraulique ne fonctionne, a été développé pour le réservoir hydraulique. En raison du grand nombre de nouveaux composants expérimentaux utilisés, le métacarpe est devenu nettement plus grand que le modèle précédent, mais la forme anatomique et la taille de la main ne sont pas une priorité à ce stade du développement.

2005
Fluidhand 8
rubber bulg soft handprosthesis with 8DOF, 4iDOF
La Fluidhand 8 comporte 8 entraînement contrôlés via 5 soupapes. Les soufflets présents dans l’index et le majeur sont couplés ensemble par système hydraulique, les entraînements de l’annulaire et de l’auriculaire sont également reliés ensemble par une soupape commune. La particularité de ce développent continu est que le métacarpe a été remplacé par un corps sous pression fermé hermétiquement. À l’intérieur du métacarpe se situe un réservoir élastique sous forme de membrane, dans laquelle sont intégrés à la fois un milieu d’entraînement (huile végétale) et l’électronique de contrôle, les soupapes et la pompe, tous les composants du système « nagent » en permanence dans le milieu d’entraînement. Un gaz à deux phases se situe à nouveau sous une pression constante de 2 bars entre l’enveloppe sous pression et la membrane.

2006
Fluidhand 9
rubber bulg soft handprosthesis with 5DOF, 5iDOF
La Fluidhand 9 comporte 5 entraînements de différentes tailles. Les articulations de base de l'index et du majeur sont pourvues d’entraînements plus puissants. Le réservoir de fluide élastique se trouve dans le poignet. Les doigts sont tendus lorsqu'ils sont vidés, le fluide est pompé depuis les articulations des doigts vers le réservoir élastique situé dans le poignet, pliant le poignet et ouvrant davantage la main. La pompe est insonorisée dans un réservoir PRFC oscillant librement, les soupapes et le contrôle se situent dans le métacarpe, qui est entièrement revêtu de PRFC. Le pouce comportant un entraînement dans sa base oscille entre la main plate et la position opposée à la prise à trois points.