
Historie der Fluidhand und der VINCENTevolution
1998
Fluidhand 1
thin foil soft robot hand with 5DOF, 5iDOF
Diese erste Softhand besteht aus dünnen Folienschichten, die zu komplexeren Antrieben in Sandwich-Bauweise zusammengefügt wurden. Fünf Finger, aufgebaut aus jeweils 6 paarweise, funktionell verschweißten Folienschichten, wobei die mittleren beiden Folien die mit Epoxydharz gefüllte Skelettstruktur bildet. Die jeweils äußeren zwei Folienschichten bilden je einen fluidischen Muskel. Dafür wurden jeweils zwei dünne Folien in der Art miteinander verschweißt, dass sich aneinandergereihte und miteinander verbundene Kammern bilden. Beim aufpumpen dieser Struktur mit einem Gas oder Flüssigkeit, zieht sich diese ähnlich dem natürlichen Muskel um ca. 20% seiner Länge zusammen, der Finger rollt sich dabei bogenartig zusammen.

1999
Fluidhand 2
silicon tube soft sobot hand with 16DOF, 11iDOF
Die neue planare Technologie zur Herstellung fluidischer Antriebe und Kinematiken war daher ideal geeignet, um Miniaturkatheter und Endoskope aktiv beweglich zu gestalten. Für den Aufbau einer künstlichen Hand waren jedoch die mit planaren Folienantrieben erreichbaren Kräfte, die mit einem Arbeitsdruck von 0,5-1 bar arbeiten, zu gering. Um höhere Greifkräfte zu erzeugen, musste ein entsprechend höherer Arbeitsdruck in den fluidischen Antrieben wirken. Für die Fluidhand 2 wurden daher „künstliche Muskeln“ auf der Basis dünner Silikonschläuche verwendet, die mit einem biegeschlaffen, dehnsteifen Gewebe aus Polyamid ummantelt wurden.

2000
Fluidhand 3
rubber bulg soft hand prosthesis with 10DOF, 1iDOF
Mit der dritten Generation der Fluidhand übertrug Schulz die Technik der flexiblen Fluidaktoren auf eine Handprothese. Um höhere Greifkräfte zu erzielen, wurden die Antriebe für das Greifen auch schwerer Objekte modifiziert. Die aufgefalteten, mit Gewebe armierten Silikonschläuche wurden durch Miniaturfaltenbälge ersetzt, die wiederum mit einem Gewebe ummantelt und in den Falten durch Nylonfäden formstabil an Gelenken aus Aluminium befestigt wurden. Drei Antriebselemente in jedem Finger, wobei die beiden distalen Faltenbalge miteinander gekoppelt wurden, sowie zwei Antriebe im Daumen ermöglichen bei dieser Hand eine Bewegung von 14 Gelenkachsen, das entspricht 14 DOF bei 10 iDOF. Angetrieben wurden die Fluidaktoren mittels einer Miniatur-Hydraulik. Das Steuerungssystem, bestehend aus Pumpe, Ventil, Elektronik, Sensorik und Tank wurden über einen ca. 1m langen Schlauch mit der Prothese verbunden. Die Hydraulikeinheit hatte die Größe eines tragbaren Telefons und wurde am Gürtel getragen.


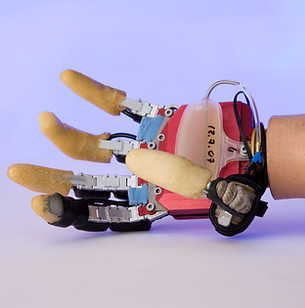
2001
Fluidhand 4
rubber bulg soft hand prosthesis with 10DOF, 6iDOF
Die Fluidhand 4 verfügt über 10 flexible Balgantriebe, die mit einem Überdruck beaufschlagt, jeweils ein Aluminium-Gelenk um 90 Grad abwinkeln. Die Streckung erfolgt durch Absaugen des Antriebsmediums und durch zusätzliche elastische Bänder. Jeder Langfinger verfügt über zwei Antriebe die miteinander fluidisch gekoppelt sind und auf jeweils ein gemeinsames Stellventil in der Mittelhand führen. Der Daumen verfügt über zwei einzeln bewegliche Antriebe, die entsprechend über ein separates Ventil betätigt werden. Das Antriebsmedium ist Wasser, diese Handprothese arbeitet erstmalig hydraulisch. Eine Miniaturpumpe saugt die Flüssigkeit aus einem elastischen Reservoir im Unterarm und pumpt diese mit bis zu 6 bar über die Ventilbank in die Faltenbalg-Antriebskammern. Die Steuerung der Pumpe und der Ventile erfolgt über einen Mikroprozessor in der Hand, der Prothesenträger gibt die Steuerungsbefehle über myoelektrische Sensoren.
2002
Fluidhand 5
rubber bulg soft handprosthesis with 8DOF, 5iDOF
Die Fluidhand 5 wurde mit dem Ziel konzipiert, alle Systemkomponenten der Miniaturhydraulik in die Mittelhand zu integrieren um die Hand dadurch zu etablierten Schaftsystemen kompatibel zu gestalten. Die Prothese kann über einen Quicksnap-Handgelenk an alle gängigen Prothesenschäfte angeschlossen werden. Dabei werden sowohl die myoelektrischen Sensoren als auch der Energiespeicher des Schaftes verwendet. Pumpe, Flüssigkeitstank, Ventilbank und Steuerung befinden sich in und auf der Mittelhand. Mit der Reduzierung der Tankgröße wurde die Anzahl der fluidischen Antriebe auf 8 reduziert. Ringfinger und kleiner Finger werden über jeweils einen Antrieb gebeugt. Im Gewichtsoptimierten Rahmen in Sandwich-Bauweise, wurde die elastische Fingerabduktion integriert. Fünf Ventile steuern die 8 Antriebe der Hand, wobei Ring-, Klein- und Mittelfinger miteinander hydraulisch verbunden sind.

2003
Fluidhand 6
rubber bulg soft handprosthesis with 4DOF, 3iDOF
Die Fluidhand 6 ist eine besonders kompakte und auf das Wesentliche reduzierte Variante der hydraulischen Handprothese. Zeige-, Mittel- und Ringfinger werden im Grundgelenk jeweils über einen flexiblen Balgantrieb bewegt, der Kleinfinger ist an den Ringfinger mechanisch gekoppelt, der Mittelfinger ist mit dem Ringfinger hydraulisch gekoppelt. Der Daumen ist im Grundgelenk aktuiert. Auf diese Weise können Daumen und Zeigefinger separat bewegt werden, die anderen Finger bewegen sich gemeinsam. Die 4 Antriebe werden über eine 3er Ventilbank angesteuert, dabei saugt die Miniaturpumpe aus einem Druckspeichertank destilliertes Wasser um es in die Antriebskammern zu pumpen. Das Gewicht der Hand beträgt ca. 350 g. Die Aluminium-Finger wurden mit einem PU-Schaum überzogen. In den Grundgelenken verfügen alle Langfinger über eine elastisch gelagerte Abduktion.

2004
Fluidhand 7
rubber bulg soft handprosthesis with 8DOF, 8iDOF
Die Fluidhand 7 ist als Experimentalhand konzipiert. Sie dienst der Entwicklung neuer Steuerungsverfahren und der Erprobung eines neuen Tanksystems, das in der Lage ist Energie zu speichern. Die Hand verfügt daher über jeweils ein Ventil für jeden der 8 Antriebe. Für den Hydrauliktank wurde eine Art Federspeicher entwickelt, der ein schnelles geräuschloses Schließen der Hand ermöglicht, ohne dass die Hydraulikpumpe arbeitet. Die Mittelhand ist durch die Vielzahl neuer und experimenteller Komponenten deutlich größer ausgefallen als das Vorgängermodell, jedoch hat in dieser Entwicklungsstufe die anatomische Form und Größe der Hand keine Priorität.

2005
Fluidhand 8
rubber bulg soft handprosthesis with 8DOF, 4iDOF
Fluidhand 8 verfügt über 8 Antriebe, die über 5 Ventile gesteuert werden. Die Faltenbälge im Zeigefinger und im Mittelfinger sind jeweils miteinander hydraulisch gekoppelt, die Antriebe von Ring- und Kleinfinger sind ebenfalls miteinander über ein gemeinsames Ventil verbunden. Das Besondere an dieser Weiterentwicklung ist, dass die Mittelhand durch einen hermetisch geschlossen Druckkörper ersetzt wurde. Im Inneren der Mittelhand befindet sich ein elastischer Tank, in Form einer Membran, in der sowohl das Antriebsmedium (Pflanzenöl) als auch die Steuerungselektronik, die Ventile und die Pumpe integriert sind, alle Systemkomponenten „schwimmen“ dabei permanent im Antriebsmedium. Zwischen Druckkörperhülle und Membran befindet sich wieder ein Zwei-Phasen-Gas mit einem konstanten Druck von 2 bar.

2006
Fluidhand 9
rubber bulg soft handprosthesis with 5DOF, 5iDOF
Die Fluidhand 9 verfügt über 5 Antriebe unterschiedlicher Größe. Die Grundgelenke von Zeigefinger und Mittelfinger sind mit stärkeren Antrieben versehen. Der elastische Flüssigkeitstank befindet sich im Handgelenk. Beim Entleeren der Finger werden diese gestreckt, die Flüssigkeit wird von den Fingergelenken in den elastischen Tank im Handgelenk gepumpt, wodurch das Handgelenk abgewinkelt wird und die Hand weiter öffnet. Die Pumpe ist geräuschisoliert in einem CFK Tank frei schwingend gelagert, Ventile und Steuerung befinden sich in der Mittelhand, die vollständig mit CFK verkleidet ist. Der Daumen mit einem Antrieb in der Basis schwenkt zwischen flacher Hand und Oppositionsstellung zum Dreipunktgriff.