
Historie der Fluidhand und der VINCENTevolution
1998
Fluidhand 1
thin foil soft robot hand with 5DOF, 5iDOF
Diese erste Softhand besteht aus dünnen Folienschichten, die zu komplexeren Antrieben in Sandwich-Bauweise zusammengefügt wurden. Fünf Finger, aufgebaut aus jeweils 6 paarweise, funktionell verschweißten Folienschichten, wobei die mittleren beiden Folien die mit Epoxydharz gefüllte Skelettstruktur bildet. Die jeweils äußeren zwei Folienschichten bilden je einen fluidischen Muskel. Dafür wurden jeweils zwei dünne Folien in der Art miteinander verschweißt, dass sich aneinandergereihte und miteinander verbundene Kammern bilden. Beim aufpumpen dieser Struktur mit einem Gas oder Flüssigkeit, zieht sich diese ähnlich dem natürlichen Muskel um ca. 20% seiner Länge zusammen, der Finger rollt sich dabei bogenartig zusammen.

1999
Fluidhand 2
silicon tube soft sobot hand with 16DOF, 11iDOF
Die neue planare Technologie zur Herstellung fluidischer Antriebe und Kinematiken war daher ideal geeignet, um Miniaturkatheter und Endoskope aktiv beweglich zu gestalten. Für den Aufbau einer künstlichen Hand waren jedoch die mit planaren Folienantrieben erreichbaren Kräfte, die mit einem Arbeitsdruck von 0,5-1 bar arbeiten, zu gering. Um höhere Greifkräfte zu erzeugen, musste ein entsprechend höherer Arbeitsdruck in den fluidischen Antrieben wirken. Für die Fluidhand 2 wurden daher „künstliche Muskeln“ auf der Basis dünner Silikonschläuche verwendet, die mit einem biegeschlaffen, dehnsteifen Gewebe aus Polyamid ummantelt wurden.

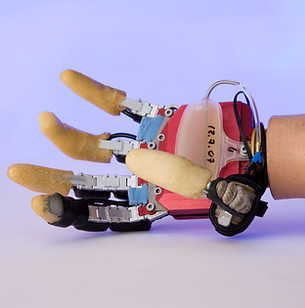
2000
Fluidhand 3
rubber bulg soft hand prosthesis with 10DOF, 1iDOF
Mit der dritten Generation der Fluidhand übertrug Schulz die Technik der flexiblen Fluidaktoren auf eine Handprothese. Um höhere Greifkräfte zu erzielen, wurden die Antriebe für das Greifen auch schwerer Objekte modifiziert. Die aufgefalteten, mit Gewebe armierten Silikonschläuche wurden durch Miniaturfaltenbälge ersetzt, die wiederum mit einem Gewebe ummantelt und in den Falten durch Nylonfäden formstabil an Gelenken aus Aluminium befestigt wurden. Drei Antriebselemente in jedem Finger, wobei die beiden distalen Faltenbalge miteinander gekoppelt wurden, sowie zwei Antriebe im Daumen ermöglichen bei dieser Hand eine Bewegung von 14 Gelenkachsen, das entspricht 14 DOF bei 10 iDOF. Angetrieben wurden die Fluidaktoren mittels einer Miniatur-Hydraulik. Das Steuerungssystem, bestehend aus Pumpe, Ventil, Elektronik, Sensorik und Tank wurden über einen ca. 1m langen Schlauch mit der Prothese verbunden. Die Hydraulikeinheit hatte die Größe eines tragbaren Telefons und wurde am Gürtel getragen.


2001
Fluidhand 4
rubber bulg soft hand prosthesis with 10DOF, 6iDOF
Die Fluidhand 4 verfügt über 10 flexible Balgantriebe, die mit einem Überdruck beaufschlagt, jeweils ein Aluminium-Gelenk um 90 Grad abwinkeln. Die Streckung erfolgt durch Absaugen des Antriebsmediums und durch zusätzliche elastische Bänder. Jeder Langfinger verfügt über zwei Antriebe die miteinander fluidisch gekoppelt sind und auf jeweils ein gemeinsames Stellventil in der Mittelhand führen. Der Daumen verfügt über zwei einzeln bewegliche Antriebe, die entsprechend über ein separates Ventil betätigt werden. Das Antriebsmedium ist Wasser, diese Handprothese arbeitet erstmalig hydraulisch. Eine Miniaturpumpe saugt die Flüssigkeit aus einem elastischen Reservoir im Unterarm und pumpt diese mit bis zu 6 bar über die Ventilbank in die Faltenbalg-Antriebskammern. Die Steuerung der Pumpe und der Ventile erfolgt über einen Mikroprozessor in der Hand, der Prothesenträger gibt die Steuerungsbefehle über myoelektrische Sensoren.
2002
Fluidhand 5
rubber bulg soft handprosthesis with 8DOF, 5iDOF
Die Fluidhand 5 wurde mit dem Ziel konzipiert, alle Systemkomponenten der Miniaturhydraulik in die Mittelhand zu integrieren um die Hand dadurch zu etablierten Schaftsystemen kompatibel zu gestalten. Die Prothese kann über einen Quicksnap-Handgelenk an alle gängigen Prothesenschäfte angeschlossen werden. Dabei werden sowohl die myoelektrischen Sensoren als auch der Energiespeicher des Schaftes verwendet. Pumpe, Flüssigkeitstank, Ventilbank und Steuerung befinden sich in und auf der Mittelhand. Mit der Reduzierung der Tankgröße wurde die Anzahl der fluidischen Antriebe auf 8 reduziert. Ringfinger und kleiner Finger werden über jeweils einen Antrieb gebeugt. Im Gewichtsoptimierten Rahmen in Sandwich-Bauweise, wurde die elastische Fingerabduktion integriert. Fünf Ventile steuern die 8 Antriebe der Hand, wobei Ring-, Klein- und Mittelfinger miteinander hydraulisch verbunden sind.

2003
Fluidhand 6
rubber bulg soft handprosthesis with 4DOF, 3iDOF
Die Fluidhand 6 ist eine besonders kompakte und auf das Wesentliche reduzierte Variante der hydraulischen Handprothese. Zeige-, Mittel- und Ringfinger werden im Grundgelenk jeweils über einen flexiblen Balgantrieb bewegt, der Kleinfinger ist an den Ringfinger mechanisch gekoppelt, der Mittelfinger ist mit dem Ringfinger hydraulisch gekoppelt. Der Daumen ist im Grundgelenk aktuiert. Auf diese Weise können Daumen und Zeigefinger separat bewegt werden, die anderen Finger bewegen sich gemeinsam. Die 4 Antriebe werden über eine 3er Ventilbank angesteuert, dabei saugt die Miniaturpumpe aus einem Druckspeichertank destilliertes Wasser um es in die Antriebskammern zu pumpen. Das Gewicht der Hand beträgt ca. 350 g. Die Aluminium-Finger wurden mit einem PU-Schaum überzogen. In den Grundgelenken verfügen alle Langfinger über eine elastisch gelagerte Abduktion.

2004
Fluidhand 7
rubber bulg soft handprosthesis with 8DOF, 8iDOF
Die Fluidhand 7 ist als Experimentalhand konzipiert. Sie dienst der Entwicklung neuer Steuerungsverfahren und der Erprobung eines neuen Tanksystems, das in der Lage ist Energie zu speichern. Die Hand verfügt daher über jeweils ein Ventil für jeden der 8 Antriebe. Für den Hydrauliktank wurde eine Art Federspeicher entwickelt, der ein schnelles geräuschloses Schließen der Hand ermöglicht, ohne dass die Hydraulikpumpe arbeitet. Die Mittelhand ist durch die Vielzahl neuer und experimenteller Komponenten deutlich größer ausgefallen als das Vorgängermodell, jedoch hat in dieser Entwicklungsstufe die anatomische Form und Größe der Hand keine Priorität.

2005
Fluidhand 8
rubber bulg soft handprosthesis with 8DOF, 4iDOF
Fluidhand 8 verfügt über 8 Antriebe, die über 5 Ventile gesteuert werden. Die Faltenbälge im Zeigefinger und im Mittelfinger sind jeweils miteinander hydraulisch gekoppelt, die Antriebe von Ring- und Kleinfinger sind ebenfalls miteinander über ein gemeinsames Ventil verbunden. Das Besondere an dieser Weiterentwicklung ist, dass die Mittelhand durch einen hermetisch geschlossen Druckkörper ersetzt wurde. Im Inneren der Mittelhand befindet sich ein elastischer Tank, in Form einer Membran, in der sowohl das Antriebsmedium (Pflanzenöl) als auch die Steuerungselektronik, die Ventile und die Pumpe integriert sind, alle Systemkomponenten „schwimmen“ dabei permanent im Antriebsmedium. Zwischen Druckkörperhülle und Membran befindet sich wieder ein Zwei-Phasen-Gas mit einem konstanten Druck von 2 bar.

2006
Fluidhand 9
rubber bulg soft handprosthesis with 5DOF, 5iDOF
Die Fluidhand 9 verfügt über 5 Antriebe unterschiedlicher Größe. Die Grundgelenke von Zeigefinger und Mittelfinger sind mit stärkeren Antrieben versehen. Der elastische Flüssigkeitstank befindet sich im Handgelenk. Beim Entleeren der Finger werden diese gestreckt, die Flüssigkeit wird von den Fingergelenken in den elastischen Tank im Handgelenk gepumpt, wodurch das Handgelenk abgewinkelt wird und die Hand weiter öffnet. Die Pumpe ist geräuschisoliert in einem CFK Tank frei schwingend gelagert, Ventile und Steuerung befinden sich in der Mittelhand, die vollständig mit CFK verkleidet ist. Der Daumen mit einem Antrieb in der Basis schwenkt zwischen flacher Hand und Oppositionsstellung zum Dreipunktgriff.
Juni 2009
Der Startschuss für Vincent Systems fällt.
Damit wird der Grundstein für die nächste Phase der Entwicklung gelegt - Die VINCENTevolution-Serie.
2010
Die VINCENTevolution war unsere erste marktreife, multiartikulierende Handprothese. Im Gegensatz zu den Fluid-Händen wurden die Finger bei diesem System durch kleine, leistungsstarke Elektromotoren angetrieben. Das ermöglichte unabhängig voneinander steuerbare Finger, eine neuartige Griffvielfalt sowie ein kompaktes, alltagstaugliches Design. Der Korpus bestand weitestgehend aus leichtem Aluminium, die Fingerspitzen aus flexiblem Kunststoff. In Kombination mit federnden Schubstangen können adaptives Greifen und hohe Haltekraft erzielt werden. Damit setzte Vincent Systems einen Meilenstein in der Entwicklung intuitiver, leichter und funktionaler Prothesen. Die VINCENTevolution bildete die technologische Grundlage für alle nachfolgenden Modelle und markierte den Beginn eines neuen Kapitels in der Handprothetik.

Unterüberschrift
VINCENTevolution
xxxx
Das VINCENTpartial-System basierte auf der gleichen Technologie wie die VINCENTevolution. Durch die Bauform, bei welcher die Motoren, direkte in die Finger integriert sind, wurde es möglich, auch teile einer Hand zu ersetzen. Das VINCENTpartial-System war damit eine der ersten myoelektrischen Prothesen für Menschen, denen 1 bis 5 Finger fehlen. Adaptives Greifen und hohe Haltekraft konnten durch flexible Fingerspitzen aus Kunststoff und federnde Schubstangen erzielt werden.

Unterüberschrift
VINCENTpartial
2013
Die VINCENTevolution2 war die weltweit erste kommerziell erhältliche Handprothese mit integriertem Tastsinn. Sie besaß fünf unabhängig steuerbare Finger, die von sechs leistungsstarken Elektromotoren angetrieben wurden. Das erstmalig eingesetzte Force-Feedback-System gab dem Nutzer über sanfte Vibrationen eine Rückmeldung zur Greifkraft und verbesserte so die Kontrolle bei filigranen Aufgaben. Die Prothese wog nur etwa 380 Gramm und war aufgrund ihrer kompakten Bauweise auch für Jugendliche ab 14 Jahren geeignet. Mit 14 auswählbaren Griffen, bot sie bereits eine hohe Griffvarianz. Anatomisch geformte Fingerspitzen und eine neue PU- Verkleidung der Handbasis, sowie der Fingerglieder sorgten für eine natürliche Silhouette, angenehme Hapik und mehr Adaption beim Greifen.

Unterüberschrift
VINCENTevolution2
2013
VINCENTpartial2 war die zweite Geneartion unserer modularen Teilhand-Systeme zum funktionellen Ersatz einzelner Finger und des Daumens. Das Herzstück dieses Systems bildeten die aktiven Einzelfinger, die wie die VINCENTevolution2 neue anatomische Fingerspitzen und Verkleidungen der Fingerglieder erhalten hatten.
Für den Daumen standen ein mechanisch passiver oder ein aktiver Aufbau zur Wahl. Technisch bot das VINCENTpartial2-System features wie proportionale Geschwindigkeits- und Kraftregelung sowie Bluetooth®-Anbindung zur Einrichtung der Prothese.

Unterüberschrift
VINCENTpartial2

2015
Die VINCENTyoung2 war die erste multiartikulierende Handprothese speziell für Kinder und Jugendliche – und zugleich die damals kleinste und leichteste myoelektrische Handprothese der Welt. Sie kombinierte anatomische Proportionen mit hoher Funktionalität und bot dabei durch da integrierte Force-Feedback-System ein taktiles Empfinden.
Angetrieben wurde die Prothese von vier Motoren: Zeige- und Mittelfinger verfügten jeweils über einen eigenen Antrieb, während Ringfinger und kleiner Finger gekoppelt waren. Der Daumen besaß ein passives Grundgelenk zur manuellen Rotation und einen Motor zum aktiven Öffnen und Schließen. Eine anatomisch geformte Soft-Shell-Hülle umschloss die gesamte Hand und sorgte für eine natürliche Optik und angenehme Haptik.
Dank der intelligenten Steuerung konnte der Nutzer über ein oder zwei EMG-Signale ohne zusätzliche Hilfsmittel mehr als zwölf verschiedene Griffe auswählen. Ergänzt wird dies durch proportionale Geschwindigkeits- und Kraftregelung sowie Bluetooth®-Anbindung zur Einrichtung. Damit setzte die VINCENTyoung neue Maßstäbe in der kindgerechten, intuitiven und funktionsreichen Handprothetik.

Unterüberschrift
VINCENTyoung2
2017
Die VINCENTevolution3 ist die dritte Generation VINCENTevolution-Serie. Sie kombiniert fünf unabhängig steuerbare Finger mit sechs leistungsstarken Elektromotoren, die eine präzise und natürliche Beweglichkeit ermöglichen. Dank des innovativen STC-Konzepts (Single Trigger Control) können alle 14 Griffarten mit nur einem Umschaltsignal ausgewählt werden, was die Bedienung intuitiv und schnell macht. Die Prothese verfügt über einen integrierten vibrotaktilen Tastsinn, der dem Nutzer über sanfte Vibrationen Rückmeldung zur Greifkraft gibt und so die Kontrolle im Alltag verbessert. Mit einem Gewicht von nur 386 Gramm in der Größe XS ist sie damals die leichteste multiartikulierende Handprothese ihrer Klasse. Die VINCENTevolution3 ist in fünf verschiedenen Größen erhältlich, wodurch auch sehr kleine sowie größere Hände anatomisch korrekt versorgt werden können.

Unterüberschrift
VINCENTevolution3
2017
VINCENTpartial3 ist die konsequente Weiterentwicklung des modularen Teilhand-Systems für die funktionelle Wiederherstellung einzelner Finger und des Daumens. Als aktive, multiartikulierende Partialhand bietet sie höhere Griff- und Tragkraft, einfaches Griffmanagement und eine hochfeste Leichtbaukonstruktion. Kern sind VINCENTactive finger in verschiedenen Längen und Dicken, die alle Gelenkachsen aktiv öffnen und schließen; adaptives Greifen über Bogenfedern und eine elastische Verkleidung verbessern Haptik und Alltagstauglichkeit. Ergänzend stehen ein VINCENTactive thumb mit aktiver Flexion und friktionsgeregelter, passiver Rotation sowie alternativ ein VINCENTpassive thumb zur Verfügung. Die Systemperipherie umfasst VINCENTpower (Energie), VINCENTcontrol (Steuerung), kompatible EMG-Sensoren oder FSR-Kraftsensoren VINCENTtouch; ein vibrotaktiles Feedback liefert VINCENTvibro im Schaft. Größenvielfalt: sieben Standardbreiten der Rahmenelemente sowie abgestufte Finger- (ca. 81,8–94,0 mm) und Daumengrößen (S/S+ 81,9 mm bzw. L 93,9 mm).

Unterüberschrift
VINCENTpartial3
2018
VINCENTyoung3 war damals die kleinste einzelfingerbewegliche Kinder- und Jugendhandprothese. Vier integrierte Motoren bewegen drei Finger und den Daumen unabhängig; 13 Griffe werden über das STC-Konzept mit nur einem Umschaltsignal gewählt. Der Daumen rotiert passiv mit einstellbarer Drehkraft, alle Gelenkachsen öffnen und schließen aktiv. Die Leichtbaukonstruktion aus Aluminiumlegierung mit Stahlrahmen bringt Robustheit bei ca. 350 g; elastische Außenhülle und robuste Innenhand erhöhen die Alltagstauglichkeit. Vibrationsfeedback (künstlicher Tastsinn), Statusanzeige und die Trainings-App VINCENT-Mobile unterstützen form- und punktgenaues Greifen. Mit 80 mm Griffweite lassen sich auch größere Gegenstände sicher fassen. Vier Handgelenksoptionen (VINCENTwrist quicksnap, wrist short – einzeln oder mit wrist flexion kombinierbar) sowie vier Farbvarianten (taubenblau, schwarz, brombeere, hautfarben) runden die Versorgung ab; Ring- und Kleinfinger bewegen sich gemeinsam.

Unterüberschrift
VINCENTyoung3
2020
Sonderanfertigung mit integriertem Akku
Unterüberschrift
Diese Sonderanfertigung stellt keine eigenständige Prothesengeneration dar – dennoch markiert sie einen bedeutenden Meilenstein in der modernen Prothetik. Bei dieser ultrakurzen Handprothese sind sowohl Akku als auch Steuerung vollständig in der Hand integriert. Sie ist damit die weltweit erste multiartikulierende Handprothese, die gänzlich ohne externe Steuerungselektronik auskommt. Lediglich zwei FSR-Sensoren, über die sie gesteuert wird, ragen aus dem Handgelenk.
Die Konstruktion basiert auf Komponenten der VINCENTpartial 3. Mit fünf integrierten Motoren ist die Prothese voll funktionsfähig. Trotz der kompakten Bauweise bringt sie bei einer Länge von nur 156 mm und einer Breite von 75 mm lediglich 412 Gramm auf die Waage – ein neuer Maßstab für Leichtbau und Integration.

2020
VINCENTevolution4
Unterüberschrift
Mit der VINCENTevolution4 brachte Vincent Systems die weltweit erste multiartikulierende Handprothese mit IP68-Zertifizierung auf den Markt – vollständig staubdicht und bis zu 30 Minuten in 1,5 Metern Tiefe wasserdicht, selbst in Salz- oder Chlorwasser. Möglich wird dies durch ein vollständig gekapseltes Gehäuse, das Elektronik und Mechanik zuverlässig schützt. Die fünf Finger werden von sechs leistungsstarken Motoren bewegt, ermöglichen präzise, natürliche Bewegungen und hohe Griffsicherheit. Eine elastische Mittelhandhülle sowie überarbeitete Fingerspitzen mit Griffzonen verbessern Haptik und Funktion im Alltag. Die intuitive Bedienung erfolgt über die patentierte Gestensteuerung – optional mit bis zu vier EMG-Kanälen. Serienmäßig integriert ist ein vibrotaktiler Tastsinn, der Greifkraft durch sanfte Vibrationen vermittelt. Erhältlich in fünf anatomisch abgestuften Größen und 25 Farbvarianten, war die VINCENTevolution4 mit nur 390 g (Größe XS) die leichteste Hightech-Prothese ihrer Art.
